In preparation for a presentation at the GCARC 2018 Hamfest, here’s a description of the current configuration of the W2MMD satellite station. Hopefully these diagrams will be useful in understanding how everything fits together and is used.
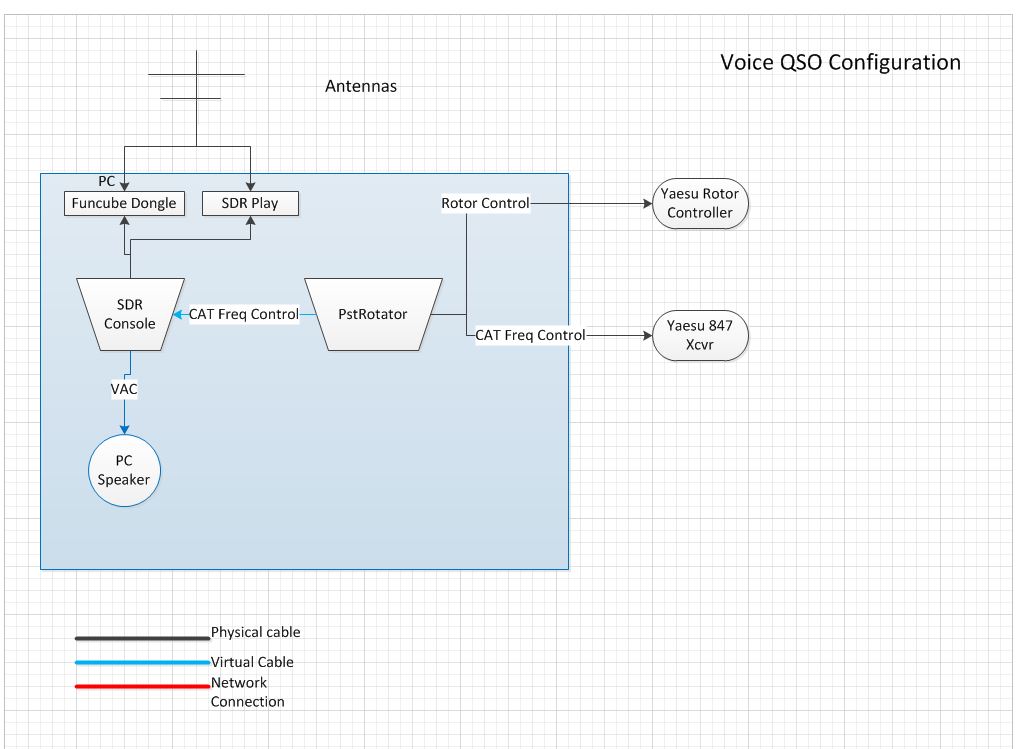
Voice Communication
Here’s how the voice communication process works. The SDR Console program runs on the PC and is connected to the 2 SDR radios – a Funcube Dongle and an SDR Play, either of which can be selected. SDR Console is connected to the PC (actually it’s done through an Audio Rodirector) to provide sound for the operator. The SDR frequency is controlled by the Satellite function of the PstRotator program, which also control the uplink freq on the 847 through a serial cable. PstRotator also is connected to the LVB rotator controller. So far it’s pretty simple.
Local data operations
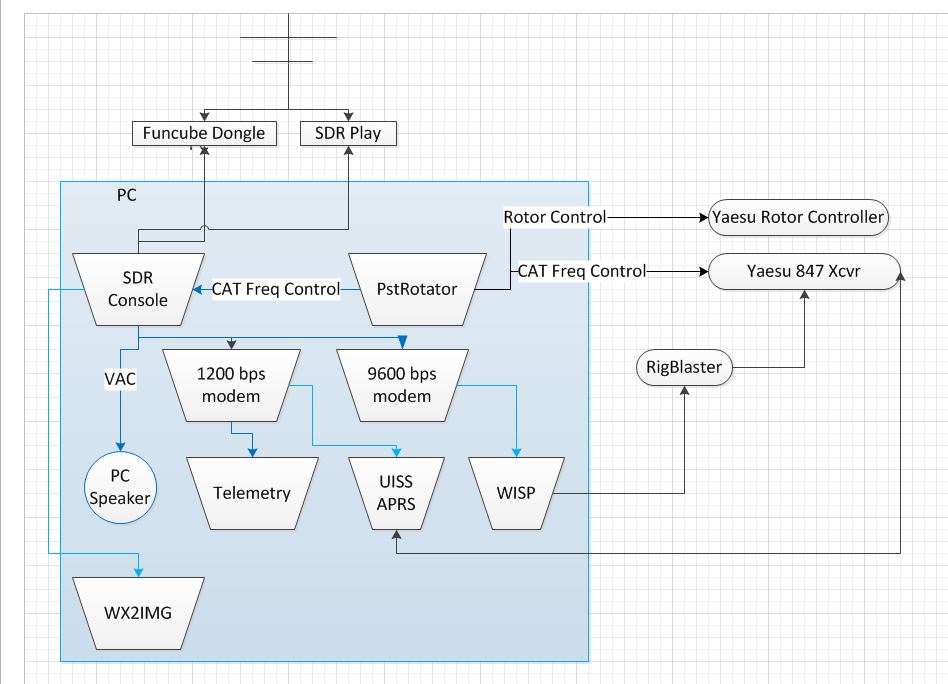
Things get a little more complicated when we’re working with data. At that point various model and decoder programs get involved, which are connected internally within the PC using virtual audio cables. The modem programs can decode packets and pass the decoded packets along to various programs that interpret the packets, such as the UISS APRS reader. A USB connection from the PC t to the RigBlaster with a cable connection to the 847 is used to transmit data.
Remote Data Operations
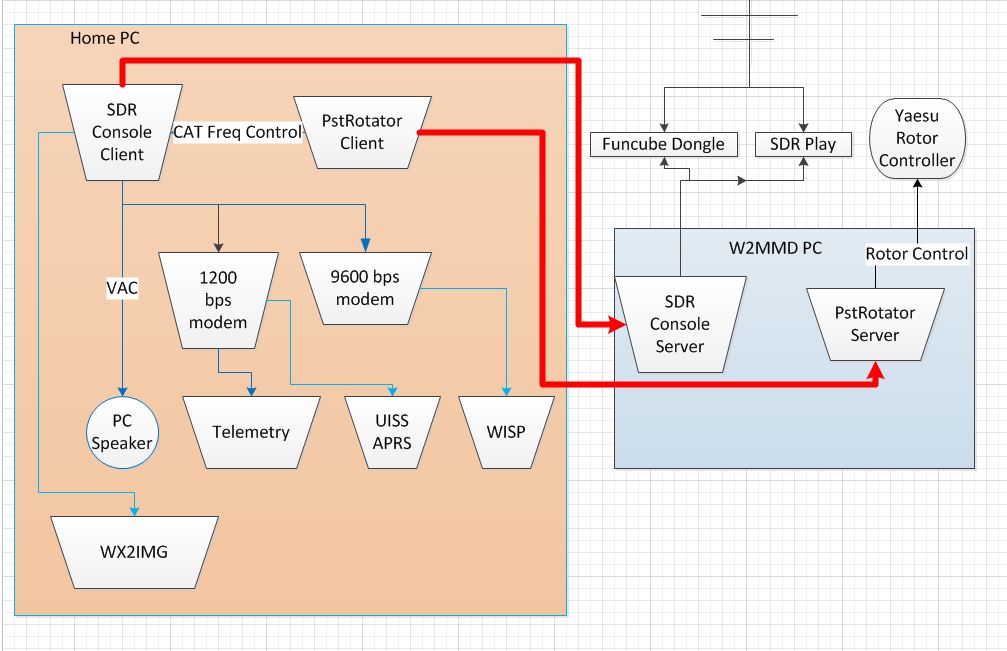
One really cool feature of this configuration is the ability to run almost all data operations remotely. The user has the client programs (those in the yellow box) running on his PC and connects his remote copy of SDR Console to the server version running at W2MMD. This allows a remote user to access any of the currently-unused SDR radios as if they were local. In addition, the client version of PstRotator running locally can command the server version at W2MMD to rotate the antennas.
SatNOGS configuration
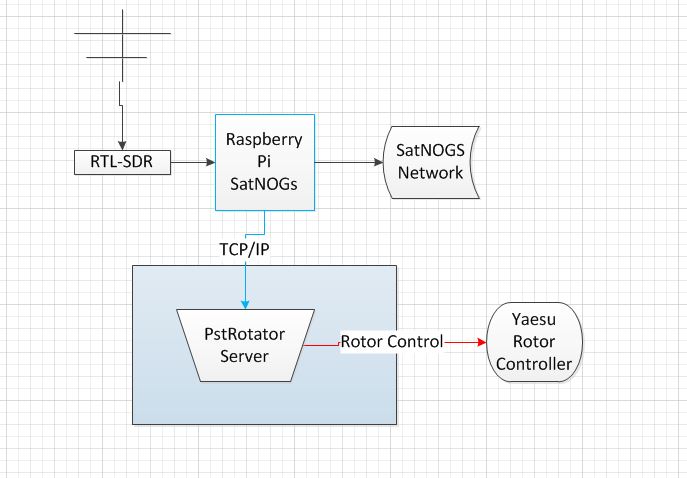
The final configuration is that used with the SatNOGS program, which runs on a Raspberry Pi computer at W2MMD. The SatNOGS software is internal to the Pi, but needs to command the rotators. This is done through a Hamlib interface built into SatNOGS that will allow it to command the PstRotator program that’s running on the PC through a TCP/IP interface. This allows the SatNOGS Pi to command the rotators without being connected to the rotator controller.
Pretty cool, eh?